Research Themes
Reinforcement Learning
Reinforcement learning is one of the key frameworks to enable open-ended learning, and it is the prime technique for decision making, optimal control and autonomous systems. Reinforcement learning techniques are at the core of systems such as AlphaGo and other board games and eSports bots developed by OpenAI and Deepmind. However, what it is often forgotten is that current reinforcement learning algorithms are particularly slow and computationally expensive to train and mostly unsuitable for online learning in embodied autonomous and assistive systems. Thus, we investigate how to make these algorithms faster and more efficient to a point in which they could be deployed in real autonomous intelligent systems and assistive systems.

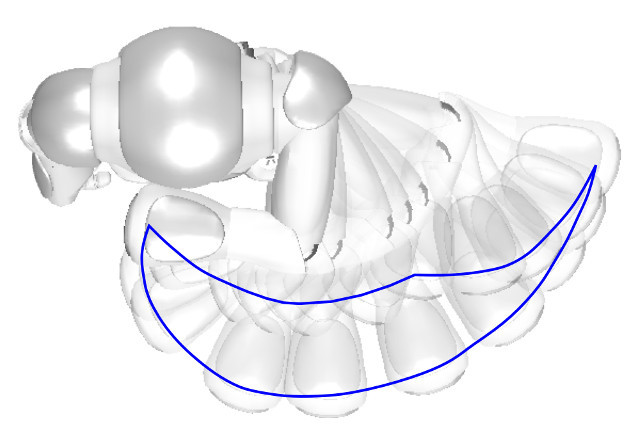
Bio-Inspired Perceptual Systems
Perception systems are crucial for the application of any learning algorithm to autonomous systems and automation. For the application of robot reaching and grasping, including smart prosthetics, we develop bio-inspired perceptual systems for haptic and vision, which would provide more suitable input to different stages of the autonomous learning model.
Scientific Projects
M-RoCK
Human-Machine Interaction Modeling for Continuous Improvement of Robot Behavior
01 Aug 2021 » 31 Jul 2024

S-FACTOR
Facilitation Robotics for Teams Foundational Research on Group Processes in Human-Robot Ensembles with Social Robots
01 Jan 2021 » 31 Dec 2023

Cooperative robots for humanitarian demining
10 Sep 2008 » 01 Jul 2009
Other Projects
Grape Variety Identification
01 Mar 2008 » 01 Jul 2008
Crea Conciencia
01 Mar 2005 » 01 May 2008

Teletón Project
01 Mar 2004 » 01 Dec 2007