M-RoCK Human-Machine Interaction Modeling for Continuous Improvement of Robot Behavior
Coordinator (PI): Robotics Innovation Center at the Deutsches Forschungszentrum für Künstliche Intelligenz GmbH
Contributors: Frank Kirchner, Elsa A. Kirchner, Nicolás Navarro-Guerrero, Shivesh Kumar
Start Date: 1st August 2021
End Date: 31st July 2024
Funded by the Federal Ministry of Education and Research (BMBF)
Project Code or Grant Number: 01IW21002
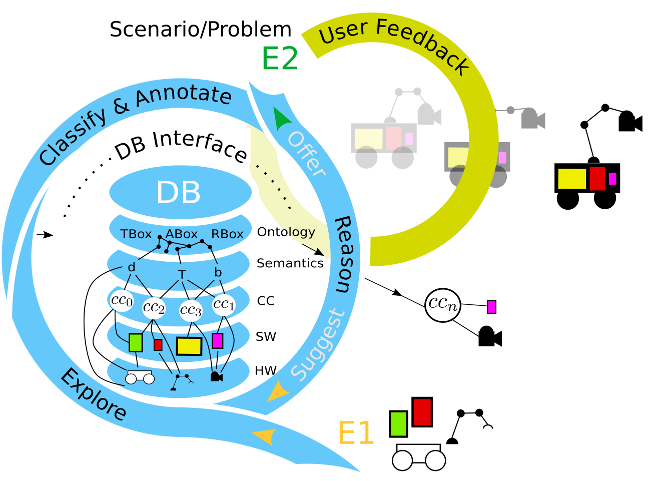
M-RoCK is part of the X-RoCK developments, enabling users to design personal assistants without any expert knowledge and help domain experts to identify opportunities to improve a system. M-RoCK builds on the results of D-RoCK and Q-RoCK: Modularization and modelling solutions developed in D-RoCK enable efficient reuse of components and describe how components can be used in a given context. Q-RoCK automatically maps the structural hardware and software complexity of current robotic systems to behaviours. The main goal of M-RoCK is to enable the use of user feedback to not only improve behaviours on the software side with respect to the individual requirements of the user, as shown in the Q-RoCK outlook, but also to realize a subsequent optimization of the Q-RoCK software flow with respect to the hardware selection. M-RoCK thus enables an automatic adaptation of a robot to the individual requirements and preferences of the interacting human. For this purpose, explicit feedback (e.g., a rating scale for performance evaluation) is combined with implicit feedback. As a source of implicit human feedback, M-RoCK makes use of the EEGs of the users. Using two different rating scenarios, we evaluate the developments in M-RoCK to validate that both laymen and domain experts can use them.
Please visit the official web site here for more details.
Project Partners:
Grants and Sponsors:
Federal Ministry of Education and Research (BMBF)Related Publications:
-
Quantifying the Effect of Feedback Frequency in Interactive Reinforcement Learning for Robotic Tasks
Neural Computing and Applications. Special Issue on Human-aligned Reinforcement Learning for Autonomous Agents and Robots. vol. 35, no. 23, pp. 16931–16943. Aug 2023. Harnack, Daniel; Pivin-Bachler, Julie; Navarro-Guerrero, Nicolás
DOI, PDF, URL, bib file. bibkey: Harnack2023Quantifying ©2023 Springer The Authors. -
Interaction in Reinforcement Learning Reduces the Need for Finely Tuned Hyperparameters in Complex Tasks
Kognitive Systeme. vol. 3, no. 2, Dec 2015. Stahlhut, Chris; Navarro-Guerrero, Nicolás; Weber, Cornelius; Wermter, Stefan
DOI, PDF, URL, bib file. bibkey: Stahlhut2015Interaction ©2015 Copyright Stahlhut et al. -
Interaction is More Beneficial in Complex Reinforcement Learning Problems than in Simple Ones
Interdisziplinärer Workshop Kognitive Systeme: Mensch, Teams, Systeme und Automaten. pp. 142-150. Bielefeld, Germany. Mar 2015. Stahlhut, Chris; Navarro-Guerrero, Nicolás; Weber, Cornelius; Wermter, Stefan
PDF, URL, bib file. bibkey: Stahlhut2015Interaction slides ©2015 Copyright tahlhut et al.
Gallery