ROMEO Robot-MEdiated Object manipulation with haptic feedback
Coordinator (PI): Nicolás Navarro-Guerrero, Forschungszentrum L3S, Leibniz Universität Hannover
Contributors: Nicolás Navarro-Guerrero, Ilana Nisky, Elish Laal and Malte Kuhlmann
Start Date: 1st April 2024
End Date: 31st March 2027
Funded by Niedersächsisches Ministerium für Wissenschaft und Kultur
Project Code or Grant Number: 15-76251-5616/2023
Robot-assisted minimally invasive surgery is a typical and successful example of robot teleoperation. Teleoperation of robot manipulators allows the operators to be out of harm’s way or protected from the elements (e.g., deep sea) or manipulate smaller or heavier items than the operator could handle. However, the overall system’s effectiveness is limited by the lack of force or tactile feedback to the user. Moreover, other tasks, such as exploratory palpation to detect hard lumps in surrounding soft tissue, cannot be performed. Thus, enhancing these teleoperated systems with force and haptic feedback might make many procedures safer and potentially faster and improve their quality. Thus, this project seeks to translate haptic and force sensing from a robot into haptic stimulation for the user in a human-centered manner, i.e., considering the user’s biomechanical and sensorimotor systems to improve teleoperated manipulation to make the system easier to operate. Such a tight amalgamation of engineering and neuroscience is challenging. However, it holds tremendous potential for improving teleoperated robot manipulation.
Project Partners:
- L3S Research Center at the Leibniz Universität Hannover
- Department of Biomedical Engineering at the Ben-Gurion University of the Negev, Israel
Grants and Sponsors:
Niedersächsisches Ministerium für Wissenschaft und Kultur via the Volkswagen Foundation under the Programme zukunft.niedersachsen: Forschungskooperation Niedersachsen – IsraelRelated Publications:
-
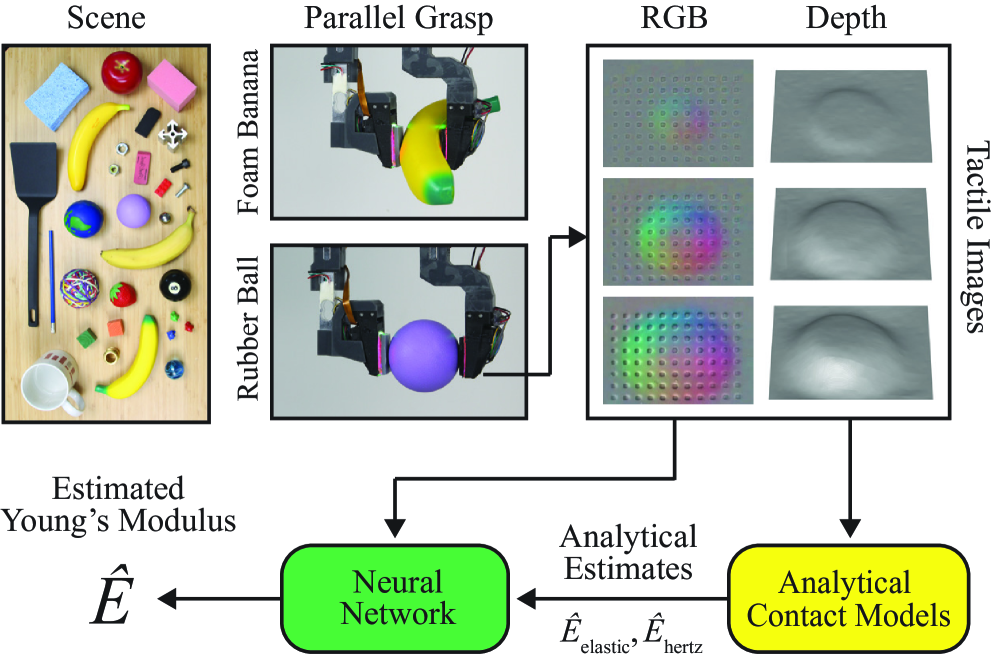
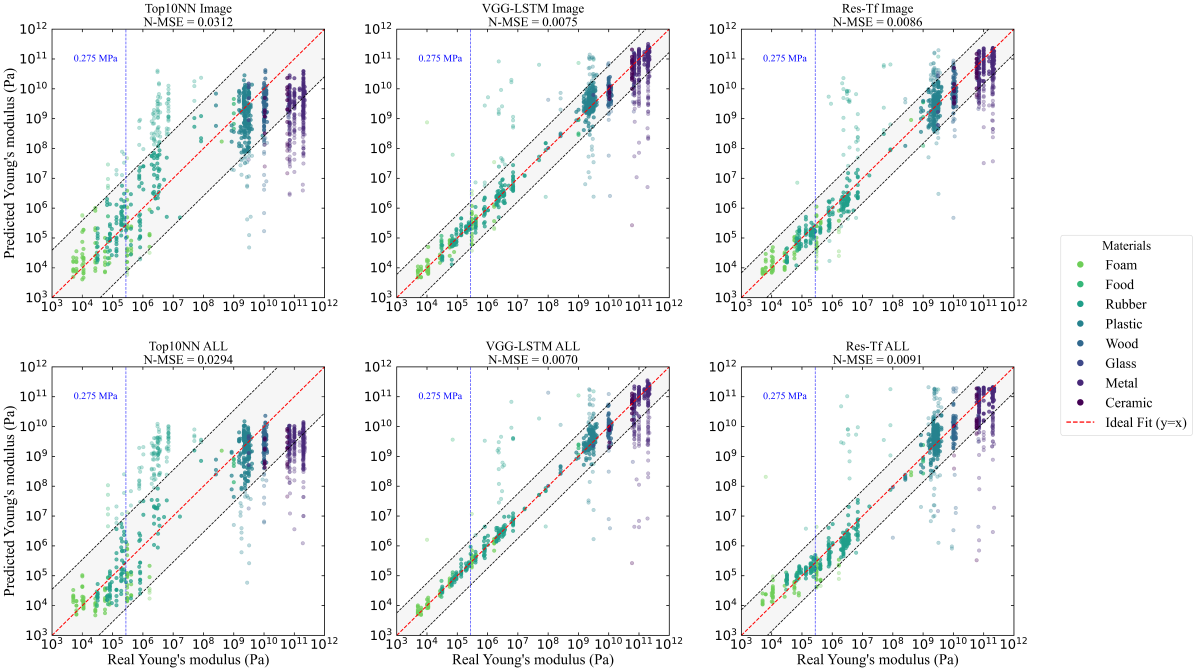
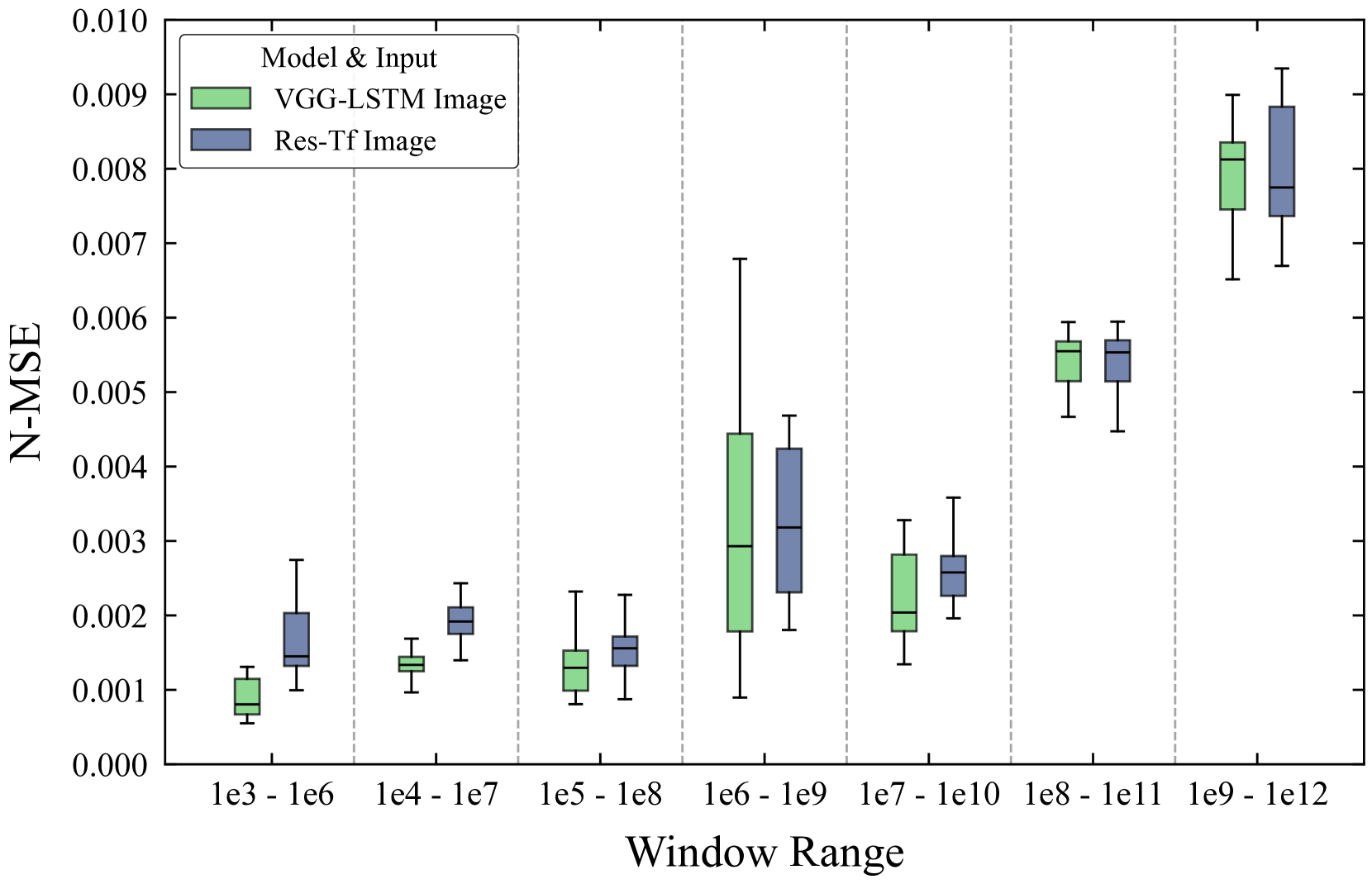
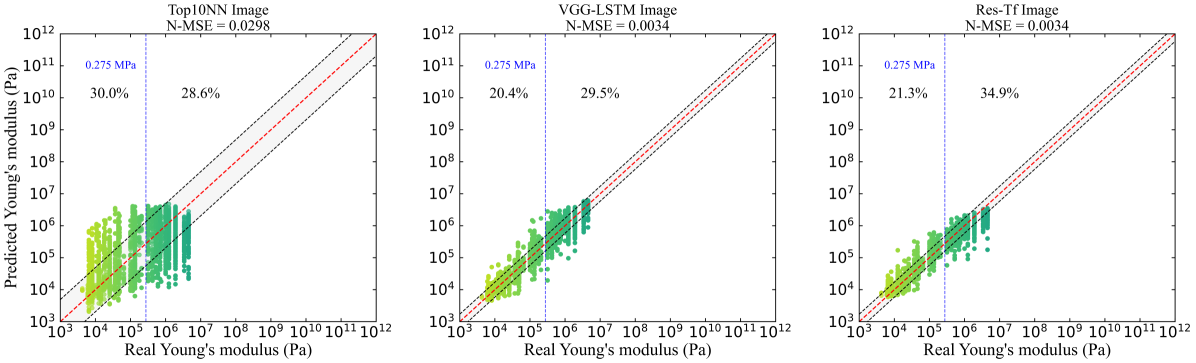
Advances in Compliance Detection: Novel Models Using Vision-Based Tactile Sensors
IEEE International Conference on Development and Learning (ICDL). pp. 1-8. Prague, Czech Republic. Sep 2025. Li, Ziteng; Kuhlmann, Malte; Nisky, Ilana; Navarro-Guerrero, Nicolás
DOI, PDF, URL, bib file. bibkey: Li2025Advances Supplementary material ©2025 The Authors. -
Toward Vision-Based Object Compliance Estimation
German Robotics Conference (GRC). pp. 1-3. Nuremberg, Germany. Mar 2025. Kuhlmann, Malte; Li, Ziteng; Navarro-Guerrero, Nicolás
PDF, bib file. bibkey: Kuhlmann2025VisionBased ©2025 The Authors. -
Visuo-Haptic Object Perception for Robots: An Overview
Autonomous Robots. vol. 47, no. 4, pp. 377–403. Apr 2023. Navarro-Guerrero, Nicolás; Toprak, Sibel; Josifovski, Josip; Jamone, Lorenzo
DOI, PDF, URL, bib file. bibkey: Navarro-Guerrero2023VisuoHaptic ©2023 Springer US The Authors.
Gallery