Vibro-Sense A Bio-inspired Tactile Sensor for Robotics
Coordinator (PI): Nicolás Navarro-Guerrero, Forschungszentrum L3S, Leibniz Universität Hannover
Contributors: Nicolás Navarro-Guerrero, and Wadhah Zai El Amri
Start Date: 1st October 2024
End Date: 31st March 2026
Funded by Federal Ministry of Education and Research (BMBF) under the DATIpilot program
Project Code or Grant Number: 03DPS1242A
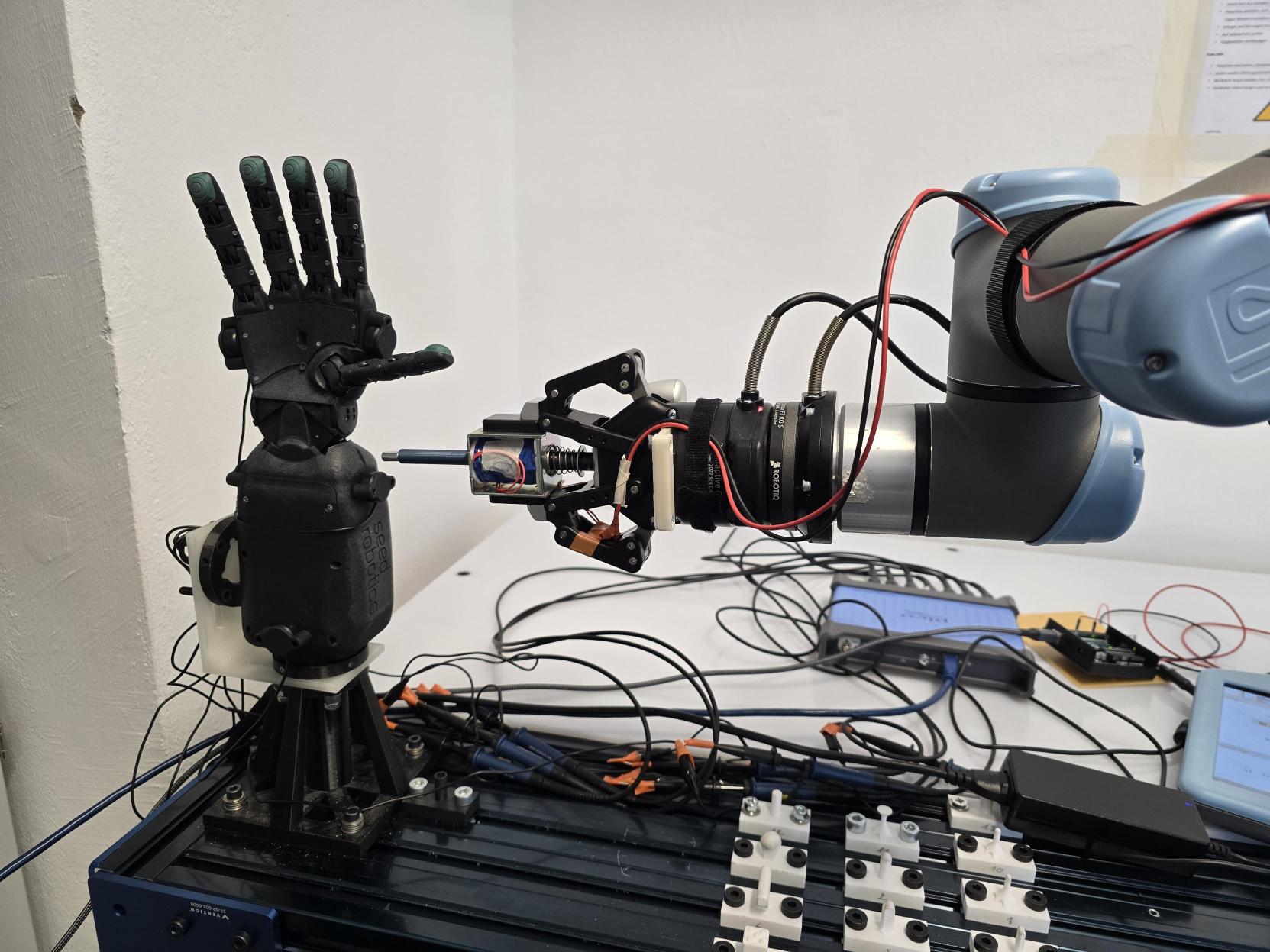
Tactile sensors are vital for many robotic applications, such as dexterous robotic grasping, prostheses, and surgical robots. However, few companies offer these types of sensors, and they are too expensive and fragile to be viable in many applications. In this project, we will further develop our vibration-based dynamical tactile sensor and integrate it into the Robotic hand of our Praxis partner, Nibotics. Our project offers a cost-effective solution to the crucial need for tactile perception and object manipulation. Our sensor is designed to seamlessly integrate into grippers of any shape and size, demonstrating its versatility. Furthermore, the sensor's electronic components are housed within the robot's hand, providing protection from water, dust, and collisions. Our longer-term goal is to develop the necessary technological solutions to enable dexterous robot manipulation at a lower cost and, thus, increase the impact of haptic perception on relevant societal problems.
Project Partners:
Grants and Sponsors:
Federal Ministry of Education and Research (BMBF) under the DATIpilot programRelated Publications:
-
Vibro-Sense: Robust Vibration-based Impulse Response Localization and Trajectory Tracking for Robotic Hands
Under Review in Robotics and Autonomous Systems. pp. 1-13. Jan 2026. Zai El Amri, Wadhah; Navarro-Guerrero, Nicolás
DOI, PDF, URL, bib file. bibkey: ZaiElAmri2026VibroSense Supplementary material ©2026 The Authors. -
Vibro-Sense: A Bio-Inspired Vibration-Based Tactile Sensor for Robotics
German Robotics Conference (GRC). pp. 1-3. Nuremberg, Germany. Mar 2025. Zai El Amri, Wadhah; Faúndes-Tejos, Nicolás; Navarro-Guerrero, Nicolás
PDF, bib file. bibkey: ZaiElAmri2025VibroSense ©2025 The Authors. -
A Biomimetic Fingerprint for Robotic Tactile Sensing
International Symposium on Robotics (ISR Europe). pp. 112-118. Stuttgart, Germany. Sep 2023. Juiña Quilachamín, Oscar Alberto; Navarro-Guerrero, Nicolás
DOI, PDF, URL, bib file. bibkey: JuinaQuilachamin2023Fingerprint Supplementary material ©2023 The Authors. -
Visuo-Haptic Object Perception for Robots: An Overview
Autonomous Robots. vol. 47, no. 4, pp. 377–403. Apr 2023. Navarro-Guerrero, Nicolás; Toprak, Sibel; Josifovski, Josip; Jamone, Lorenzo
DOI, PDF, URL, bib file. bibkey: Navarro-Guerrero2023VisuoHaptic ©2023 Springer US The Authors. -
AU Dataset for Visuo-Haptic Object Recognition for Robots
figshare. Jun 2021. Bonner, Lasse Emil R.; Buhl, Daniel Daugaard; Kristensen, Kristian; Navarro-Guerrero, Nicolás
DOI, PDF, URL, bib file. bibkey: Bonner2021AU ©2021 CC BY 4.0 The Authors. -
Evaluating Integration Strategies for Visuo-Haptic Object Recognition
Cognitive Computation. vol. 10, no. 3, pp. 408–425. Jun 2018. Toprak, Sibel; Navarro-Guerrero, Nicolás; Wermter, Stefan
DOI, PDF, URL, bib file. bibkey: Toprak2018Evaluating Supplementary material ©2018 Springer US The Authors.
Related Media:
-
„ti“ 1+2/2025: In Gesellschaft mit KI – Risiken und Chancen
Arbeitskreis der Technologietransferstellen niedersächsischer Hochschulen. vol. 1+2/2025, pp. 48. Jun 2025. Amrhein-Bläser, Christina
URL,
Gallery
.jpeg)
.jpeg)
.jpeg)
.jpeg)
.jpeg)